前言
一上来就给我来了个大的,上ubuntu发现没有网络,WIFI没有用,找不到网络,给我吓坏了,连夜去B站搜索解决办法,结果还好,找到了我的网卡型号然后去github上找到了对应的驱动直接拿下,又可以用WIFI了!,以下是链接。
https://www.bilibili.com/opus/950588438828023813
https://github.com/HRex39/rtl8852be
下面将根据ROS2二十一讲的教程来进行,今天学习第三讲,附上图文教程链接
安装
安装ubuntu
因为这里我已经安装了双系统的20.04LTS版本的ubuntu,所以我跳过这一步骤,虚拟机安装的教程桂桂可以跟着走一遍。
安装ROS2
打开终端的快捷指令:ctrl+alt+t
前面的部分都可以按照视频教程走,到出现Failed to connect的时候需要走一下比较复杂的处理步骤
第一是登陆https://www.ipaddress.com去搜索raw.githubusercontent.com的ip地址
得到其ip地址为:185.199.108.133
随后我们需要对ubuntu进行一下映射,使用以下命令
sudo gedit /etc/hosts这个文件保存的是不同的ip地址映射不同域名的关系,我们加上上面的ip和地址
桂桂补充
在我电脑上根据灿灿指导仍然报错,更换IP地址为 199.232.28.133 raw.githubusercontent.com 后运行成功
完成上述步骤后我们继续跟着安装教程步骤走,到最后的安装步骤我出现了问题
因为UP主使用的版本是ubuntu22.04LTS,而我使用的是20.04,所以我要修改安装指令改成
sudo apt install ros-foxy-desktop接下来就是漫长的等待安装。
安装完成后可以在其他位置/计算机/opt/ros/foxy/下找到
设置环境变量
由于我此前安装过ROS1,设置环境变量时有冲突,所以我需要先注释掉ROS1的环境变量,在主目录/.bashrc注释掉即可
随后运行以下命令
source /opt/ros/foxy/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc 验证
一个hello world发布器和监听器件:
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_cpp listener小海龟
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
桂桂学习成果反馈
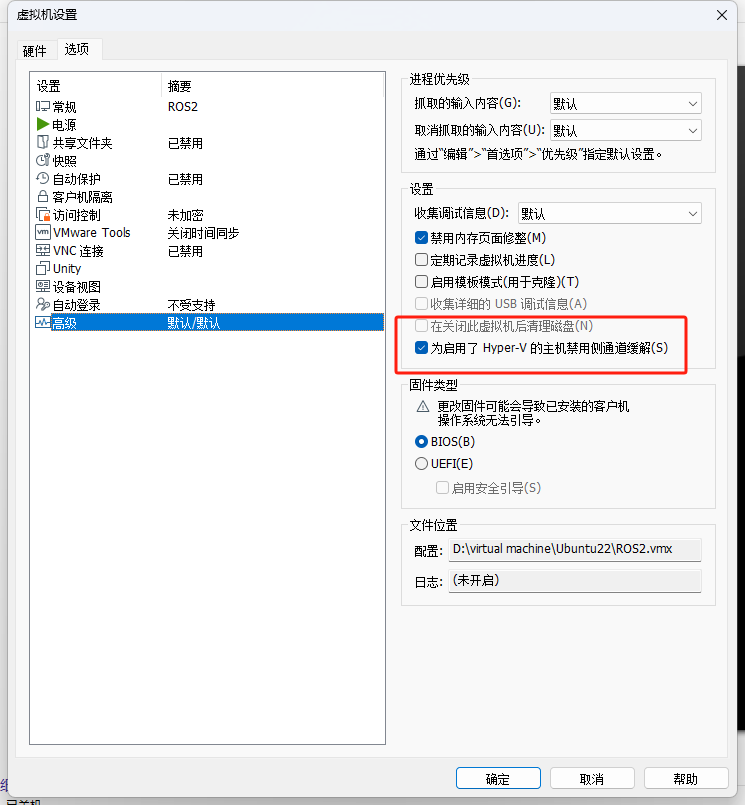
在灿灿老师的帮助下,我完成了Ubuntu和Ros2的安装,在安装过程中,首先是出现Failed to connect时域名不一样与教程不一样所导致的错误;其次是安装“sudo apt install ros-humble-desktop”时,我发现安装完之后没有对应ROS2文件存储于opt中,后来发现是断电之后进入自锁状态,在灿灿帮助下采用sudo+提示命令语句完成了ros-humble-desktop的安装;最为重要的是,虚拟机从安装开始到今天都异常的卡,不管是开启还是关闭都十分卡顿,而且还弹出了一个有关侧通道的提示窗口,我毫不在意,即使窗口提示“安全性提升,但会降低性能”,我也没有意识到是否是这个软件本身需要设置才能降低卡顿情况的出现,灿灿经过一顿鼓捣,在关闭虚拟机的状态下,对虚拟机进行设置,勾选“禁侧通道缓解功能”,同时可以适当降低内存大小,有效提升性能效率。
最后在小乌龟这个测试下,我很纳闷为什么我的乌龟是死的,后来灿灿给我解释说,一个终端作为显示器,一个终端作为控制器,我的输入命令应该在控制器中,才能够有效控制乌龟的行进方向。

灿灿老师评教分数:100分
桂桂学员评价为:骨灰级SSSSSSS级精英老教授——陈永灿。