ROS2中的激光雷达
ROS2中的激光雷达的节点会在指定名称的话题里发布消息,话题名称在REP-138中推荐为/scan
激光雷达的消息类型为sensor_msgs::LaserScan
RViz2查看激光雷达数据
我们先打开机器人仿真环境,机器人的脚底就是激光雷达
cd ros2_ws
source install/setup.bash
ros2 launch wpr_simulation2 wpb_simple_launch.py打开新窗口加载环境变量后打开rviz2
source ~/ros2_ws/install/setup.bash
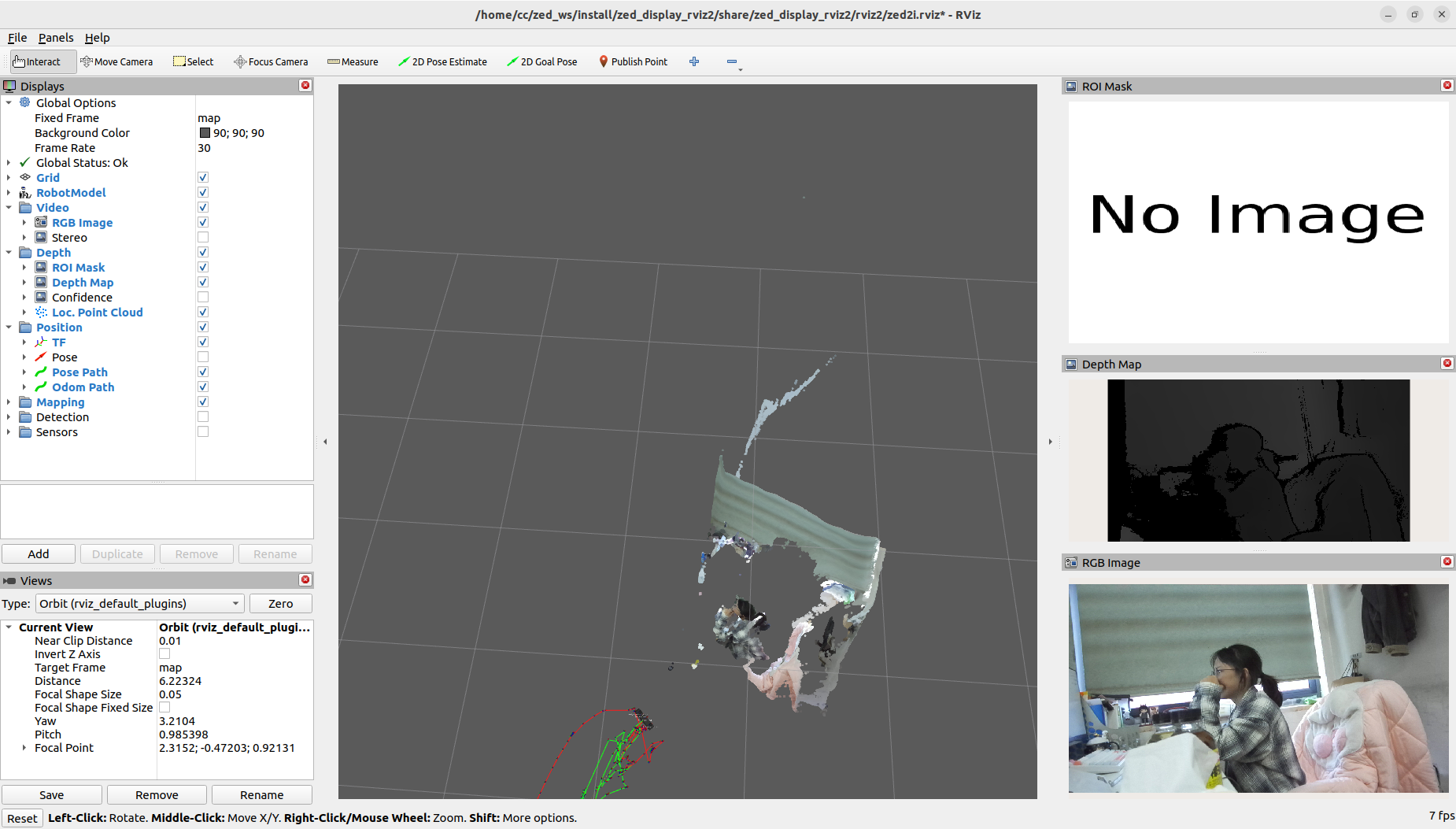
rviz2打开之后按照书本设置好,可以看到点云和机器人在rviz2中显示
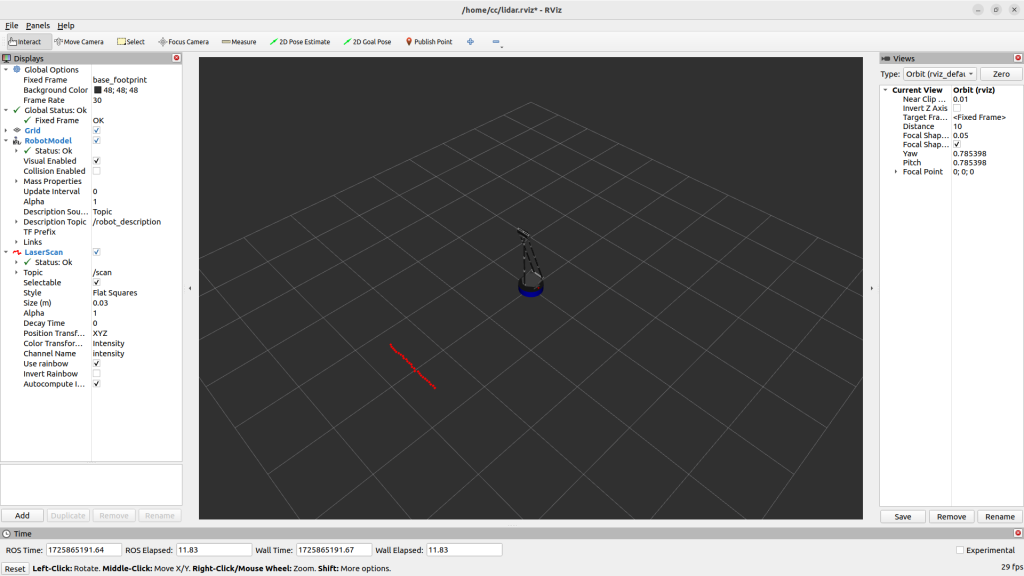
设置好之后保存rviz2设置以便以后直接加载,加载命令:
rivz2 -d lidar.rviz激光雷达数据获取
#include<rclcpp/rclcpp.hpp>
#include<sensor_msgs/msg/laser_scan.hpp>
std::shared_ptr<rclcpp::Node> node;
void LidarCallback(const sensor_msgs::msg::LaserScan::SharedPtr msg)
{
int nNum = msg->ranges.size();
int nMid = nNum / 2;
float fMidDist = msg->ranges[nMid];
RCLCPP_INFO(node->get_logger(),"ranges[%d]=%fm",nMid,fMidDist);
}
int main(int argc, char ** argv)
{
rclcpp::init(argc,argv);
node = std::make_shared<rclcpp::Node>("lidar_data_node");
auto lidar_sub = node->create_subscription<sensor_msgs::msg::LaserScan>("/scan",10,LidarCallback);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
add_executable(lidar_data src/lidar_data.cpp)
ament_target_dependencies(lidar_data "rclcpp" "sensor_msgs")
install(
TARGETS lidar_data
DESTINATION lib/${PROJECT_NAME}
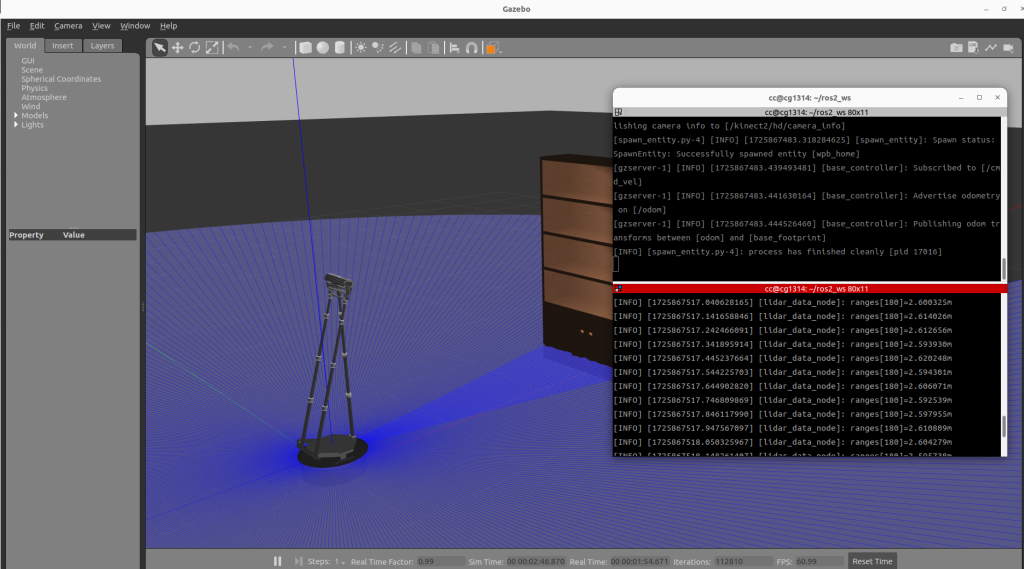
) <depend>rclcpp</depend>
<depend>sensor_msgs</depend>打开机器人仿真程序和我们的数据获取程序,结果如下,读取成功
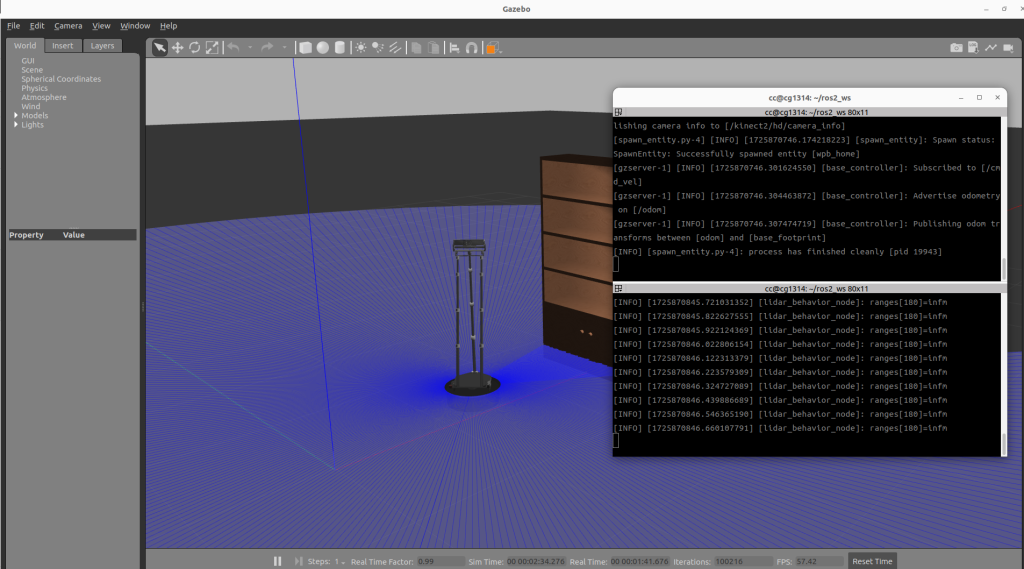
基于激光雷达的避障实现
实现一个避障程序,程序订阅激光雷达的“/scan“话题,从中接受激光雷达发来的sensor_mgs::LaserScan类型消息报,并解析出雷达测距值,根据测距值让机器人做出反应,前方没有障碍物就前进,前方遇到障碍物就转向,将根据测距值计算出来的速度值打包成geometry_msgs::Twist类型的消息包,发布到cmd_vel话题中
#include<rclcpp/rclcpp.hpp>
#include<sensor_msgs/msg/laser_scan.hpp>
#include<geometry_msgs/msg/twist.hpp>
std::shared_ptr<rclcpp::Node> node;
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr vel_pub;
int nCount = 0;
void LidarCallback(const sensor_msgs::msg::LaserScan::SharedPtr msg)
{
int nNum = msg->ranges.size();
int nMid = nNum/2;
float fMidDist = msg->ranges[nMid];
RCLCPP_INFO(node->get_logger(),"ranges[%d]=%fm",nMid,fMidDist);
if(nCount > 0)
{
nCount --;
return;
}
geometry_msgs::msg::Twist vel_msg;
if(fMidDist < 1.5f)
{
vel_msg.angular.z=0.3;
nCount = 100;
}
else
{
vel_msg.linear.x=0.1;
}
vel_pub->publish(vel_msg);
}
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
node = std::make_shared<rclcpp::Node>("lidar_behavior_node");
vel_pub = node->create_publisher<geometry_msgs::msg::Twist>("/cmd_vel",10);
auto lidar_sub = node->create_subscription<sensor_msgs::msg::LaserScan>("/scan",10,LidarCallback);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(geometry_msgs REQUIRED)
add_executable(lidar_data src/lidar_data.cpp)
ament_target_dependencies(lidar_data "rclcpp" "sensor_msgs")
add_executable(lidar_behavior src/lidar_behavior.cpp)
ament_target_dependencies(lidar_behavior "rclcpp" "sensor_msgs" "geometry_msgs")
install(
TARGETS lidar_data lidar_behavior
DESTINATION lib/${PROJECT_NAME}
) <depend>rclcpp</depend>
<depend>sensor_msgs</depend>
<depend>geometry_msgs</depend>