准备工作
运行locale命令后包括了UTF-8之后无需继续设置语言环境,直接开始准备工作,命令可以从官网复制:https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
添加ROS2软件源
sudo apt install software-properties-common
sudo add-apt-repository universe
sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg最后一个命令大概无法连接,我们换成下面的
wget http://packages.ros.org/ros.key
sudo cp ros.key /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
sudo apt upgrade安装ROS2
sudo apt install ros-humble-desktop安装好之后可以设置一下.bashrc让每次打开新终端的时候自动加载ROS2的环境设置
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc安装编译工具
sudo apt install ros-dev-tools
测试ROS2指令
关闭该终端打开一个新终端,输入ros2,如果有反应就成功了
从APT软件源安装应用程序
sudo apt update
sudo apt install ros-humble-rqt-robot-steering
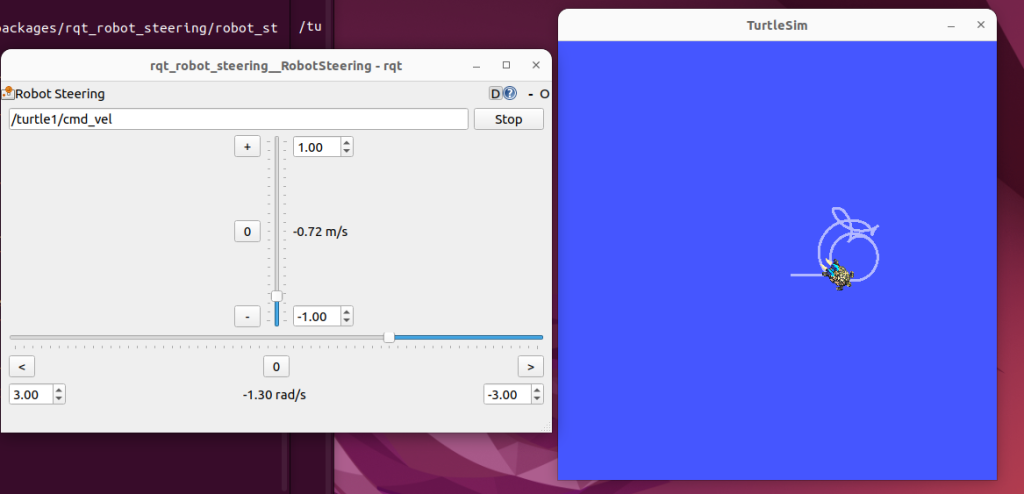
ros2 run rqt_robot_steering rqt_robot_steering
#开一个新的窗口输入
ros2 run turtlesim turtlesim_node将左上角改成/turtle1/cmd_vel,然后拖动滑块,乌龟便会开始动起来
ROS2工作空间
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws
colcon build从github上下载安装应用程序
sudo apt install git
cd ~/ros2_ws/src
git clone https:\\github.com/6-robot/wpr_simulation2.git
cd wpr_simulation2/srcipts/
./install_for_humble.sh
cd ~/ros2_ws
colcon build
source install/setup.bash
ros2 launch wpr_simulation2 wpb_simple.launch.py
ros2 run rqt_robot_steering rqt_robot_steering
#修改左上角为cmd_vel,移动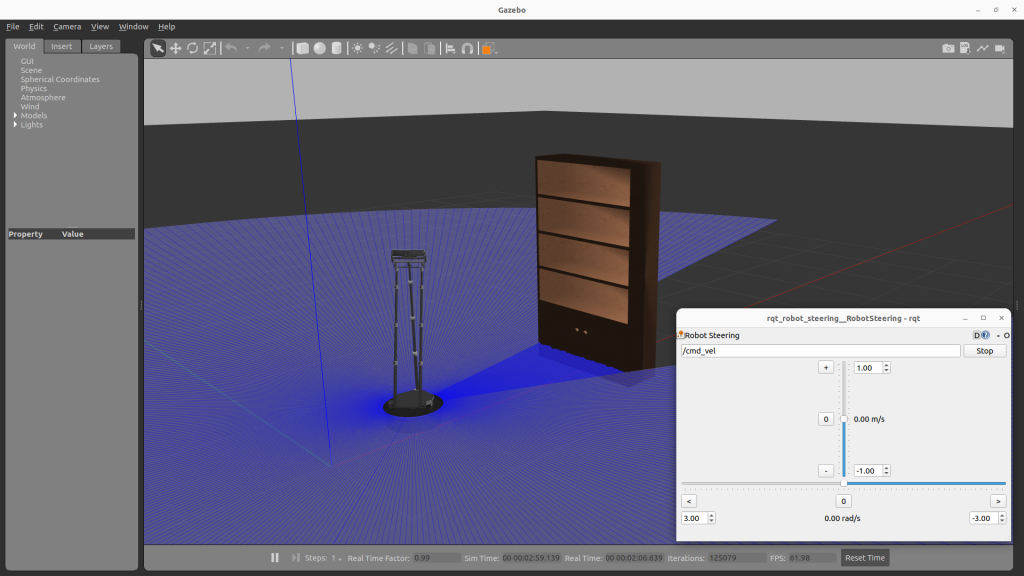
Visual Studio Code
去官网下载https://code.visualstudio.com/
在下载目录下右键打开终端sudo dpkg -i code_1.93.0-1725459079_amd64.deb安装VSC
安装完成后终端输入code可以打开VSC,在拓展商店安装chinese和cmake插件
插件安装完后在左上角文件下拉点击将文件夹添加到工作区,可以添加src目录进来
terminator
sudo apt install terminator